4.2 池化层讲解
joker ... 2022-4-7 大约 9 分钟
# 4.2 池化层讲解
# 1. 简介
# 1.1 简介
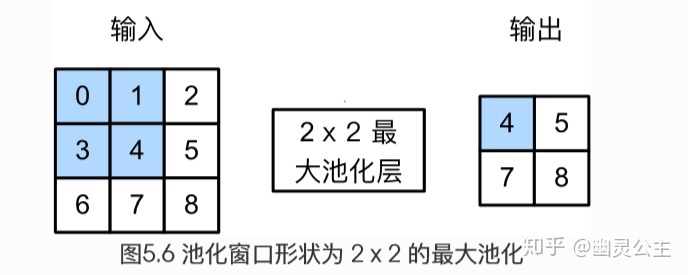
比卷积的计算方法还要简单。以二维最大池化层为例,池化窗口从输入数组的最左上方开始,从左到右,从上到下,依次在输入数组上滑动。当池化窗口滑动到某一位置时,窗口中的输入子数组的最大值即输入数组中相应位置的元素。很绕是吧,看文字我也晕。
# 1.2 意义
池化它有啥作用呢?
魏秀参博士在CNN_book一书中做了很好的解答:
- 特征不变性(feature invariant) 汇合操作使模型更关注是否存在某些特征而不是特征具体的位置 可看作是一种很强的先验,使特征学习包含某种程度自由度,能容忍一些特征微小的位移
- 特征降维 由于汇合操作的降采样作用,汇合结果中的一个元素对应于原输入数据的一个子区域(sub-region),因此汇合相当于在空间范围内做了维度约减(spatially dimension reduction),从而使模型可以抽取更广范围的特征 同时减小了下一层输入大小,进而减小计算量和参数个数
- 在一定程度上能防止过拟合的发生
三种池化的意义
最大池化可以获取局部信息,可以更好保留纹理上的特征。如果不用观察物体在图片中的具体位置,只关心其是否出现,则使用最大池化效果比较好。平均池化往往能保留整体数据的特征,能凸出背景的信息。随机池化中元素值大的被选中的概率也大,但不是像最大池化总是取最大值。随机池化一方面最大化地保证了Max值的取值,一方面又确保了不会完全是max值起作用,造成过度失真。除此之外,其可以在一定程度上避免过拟合。
# 2. 池化公式
最大池化输出
下面我们写代码验证一下最大池化层是如何计算的:
# 3. 参数讲解
我们先来看一下基本参数,一共六个:
kernel_size:表示做最大池化的窗口大小,可以是单个值,也可以是tuple元组
stride :步长,可以是单个值,也可以是tuple元组
padding :填充,可以是单个值,也可以是tuple元组
dilation :控制窗口中元素步幅
return_indices :布尔类型,返回最大值位置索引
ceil_mode :布尔类型,为True,用向上取整的方法,计算输出形状;默认是向下取整。
关于
kernel_size的详解:注意这里的
kernel_size跟卷积核不是一个东西。kernel_size可以看做是一个滑动窗口,这个窗口的大小由自己指定,如果输入是单个值,例如 ,那么窗口的大小就是 ,还可以输入元组,例如$ (3, 2)$ ,那么窗口大小就是 。最大池化的方法就是取这个窗口覆盖元素中的最大值。
关于
stride的详解:上一个参数我们确定了滑动窗口的大小,现在我们来确定这个窗口如何进行滑动。如果不指定这个参数,那么默认步长跟最大池化窗口大小一致。如果指定了参数,那么将按照我们指定的参数进行滑动。例如 , 那么窗口将每次向右滑动三个元素位置,或者向下滑动两个元素位置。
关于
padding的详解:这参数控制如何进行填充,填充值默认为0。如果是单个值,例如 1,那么将在周围填充一圈0。还可以用元组制定如何填充,例如,表示在上下两个方向个填充两行0,在左右两个方向各填充一列0。
关于
dilation的详解:关于
return_indices的详解:这是个布尔类型值,表示返回值中是否包含最大值位置的索引。注意这个最大值指的是在所有窗口中产生的最大值,如果窗口产生的最大值总共有5个,就会有5个返回值。
关于
ceil_mode的详解:这个也是布尔类型值,它决定的是在计算输出结果形状的时候,是使用向上取整还是向下取整。怎么计算输出形状,下面会讲到。一看就知道了。
首先验证 kernel_size 参数:
import torch
import torch.nn as nn
# 仅定义一个 3x3 的池化层窗口
m = nn.MaxPool2d(kernel_size=(3, 3))
# 定义输入
# 四个参数分别表示 (batch_size, C_in, H_in, W_in)
# 分别对应,批处理大小,输入通道数,图像高度(像素),图像宽度(像素)
# 为了简化表示,我们只模拟单张图片输入,单通道图片,图片大小是6x6
input = torch.randn(1, 1, 6, 6)
print(input)
output = m(input)
print(output)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
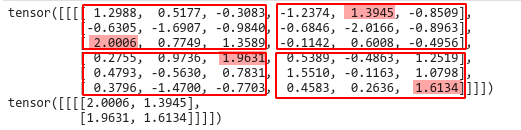
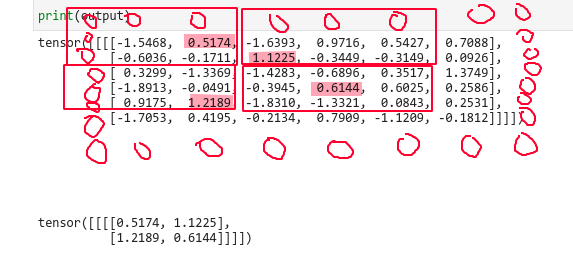
第一个tensor是我们的输入数据 ,我们画红线的区域就是我们设置的窗口大小 ,背景色为红色的值,为该区域的最大值。
第二个tensor就是我们最大池化后的结果,跟我们标注的一模一样。
这个就是最基本的最大池化。
之后我们验证一下 stride 参数:
import torch
import torch.nn as nn
# 仅定义一个 3x3 的池化层窗口
m = nn.MaxPool2d(kernel_size=(3, 3), stride=(2, 2))
# 定义输入
# 四个参数分别表示 (batch_size, C_in, H_in, W_in)
# 分别对应,批处理大小,输入通道数,图像高度(像素),图像宽度(像素)
# 为了简化表示,我们只模拟单张图片输入,单通道图片,图片大小是6x6
input = torch.randn(1, 1, 6, 6)
print(input)
output = m(input)
print(output)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
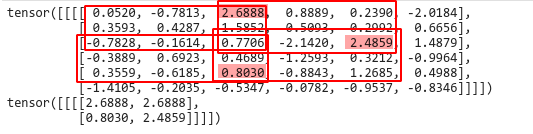
红色的还是我们的窗口,但是我们的步长变为了2,可以看到第一个窗口和向右滑动后的窗口,他们的最大值刚好是重叠的部分都是2.688,向下滑动之后,最大值是0.8030,再次向右滑动,最大值是2.4859。
可以看到我们在滑动的时候省略了部分数值,因为剩下的数据不够一次滑动了,于是我们将他们丢弃了。
其实最后图片的宽度和高度还可以通过上面两个公式来计算,我们公式中用的是向下取整,因此我们丢弃了不足的数据。现在我们试试向上取整。
利用 ceil_mode 参数向上取整
import torch
import torch.nn as nn
# 仅定义一个 3x3 的池化层窗口
m = nn.MaxPool2d(kernel_size=(3, 3), stride=(2, 2), ceil_mode=True)
# 定义输入
# 四个参数分别表示 (batch_size, C_in, H_in, W_in)
# 分别对应,批处理大小,输入通道数,图像高度(像素),图像宽度(像素)
# 为了简化表示,我们只模拟单张图片输入,单通道图片,图片大小是6x6
input = torch.randn(1, 1, 6, 6)
print(input)
output = m(input)
print('\n\n\n\n\n')
print(output)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
从结果可以看出,输出的size由原来的变成了现在的。这就是向上取整的结果。为什么会出现这样的结果呢?
这看起来像是我们对输入进行了填充,但是这个填充值不会参与到计算最大值中。
继续验证 padding 参数:
import torch
import torch.nn as nn
# 仅定义一个 3x3 的池化层窗口
m = nn.MaxPool2d(kernel_size=(3, 3), stride=(3, 3), padding=(1, 1))
# 定义输入
# 四个参数分别表示 (batch_size, C_in, H_in, W_in)
# 分别对应,批处理大小,输入通道数,图像高度(像素),图像宽度(像素)
# 为了简化表示,我们只模拟单张图片输入,单通道图片,图片大小是6x6
input = torch.randn(1, 1, 6, 6)
print(input)
output = m(input)
print('\n\n')
print(output)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
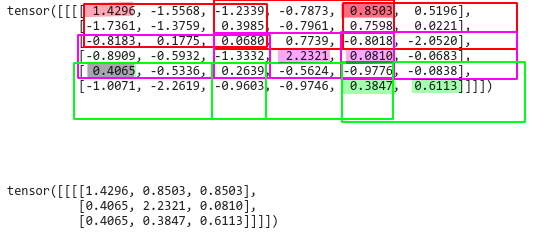
我们对周围填充了一圈0,我们滑动窗口的范围就变化了,这就是填充的作用。
但是有一点需要注意,就是即使我们填充了0,这个0也不会被选为最大值。例如上图的左上角四个数据,如果我们全部变为负数,结果是-0.1711,而不会是我们填充的0值,这一点要注意。
最后验证 return_indices 参数:
import torch
import torch.nn as nn
# 仅定义一个 3x3 的池化层窗口
m = nn.MaxPool2d(kernel_size=(3, 3), return_indices=True)
# 定义输入
# 四个参数分别表示 (batch_size, C_in, H_in, W_in)
# 分别对应,批处理大小,输入通道数,图像高度(像素),图像宽度(像素)
# 为了简化表示,我们只模拟单张图片输入,单通道图片,图片大小是6x6
input = torch.randn(1, 1, 6, 6)
print(input)
output = m(input)
print(output)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
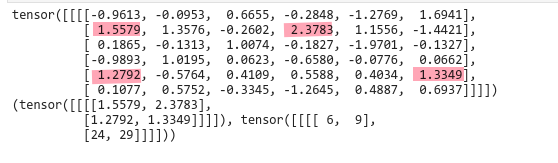
仅仅是多返回了一个位置信息。元素位置从0开始计数,6表示第7个元素,9表示第10个元素…需要注意的是,返回值实际上是多维的数据,但是我们只看相关的元素位置信息,忽略维度的问题。
# 4. 下采样
from PIL import Image
from matplotlib import pyplot as plt
import numpy as np
import torch.nn as nn
import torch
img = Image.open('./test.jpg')
img = np.array(img)
print("图片的尺寸", img.shape)
plt.imshow(img)
img = np.array(img).transpose(2, 0, 1)
m = nn.MaxPool2d(kernel_size=(3,3), stride=(2,2))
torch_img = torch.FloatTensor(img)
out = m(torch_img)
print(out.shape)
plt.figure()
mean_pool_img = out.transpose(0,2).transpose(0,1)
# 把图像变成
mean_pool_img = mean_pool_img.numpy().clip(0, 255).astype(int)
plt.imshow(mean_pool_img)
print("下采样后图片大小",mean_pool_img.shape)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
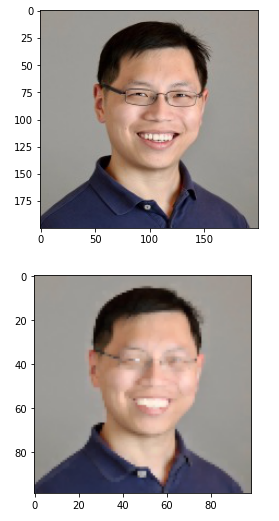
结果如下
图片的尺寸 (200, 200, 3)
torch.Size([3, 99, 99])
下采样后图片大小 (99, 99, 3)
1
2
3
2
3
下采样1/2后。图片的展示效果
参考链接
https://blog.csdn.net/quiet_girl/article/details/84579038